HLS学习入门(索贝尔算子1)
本节介绍了一种使用 HLS 实现 Sobel 检测的方法
一、Sobel 原理介绍
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一离散性差分算子,用来运算图像亮度函
数的灰度之近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
Sobel 卷积因子为:
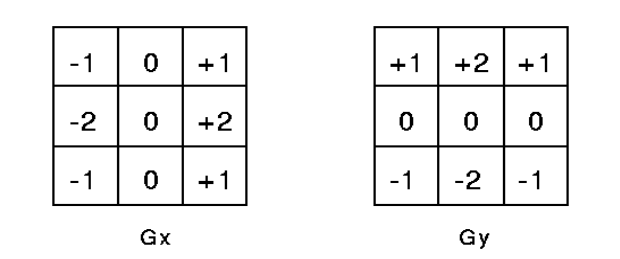
该算子包含两组 3x3 的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差
分近似值。如果以 A 代表原始图像,Gx 及 Gy 分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
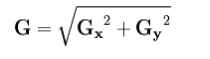
其中 f(a,b), 表示图像(a,b)点的灰度值;
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小
通常,为了提高效率 使用不开平方的近似值:
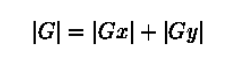
如果梯度 G 大于某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
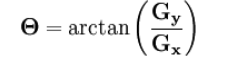
Sobel 算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作
用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测
方法。
二、代码解析
#include "top.h"
void hls_sobel(AXI_STREAM& INPUT_STREAM, AXI_STREAM& OUTPUT_STREAM, int rows, int cols)
{
//Create AXI streaming interfaces for the core
#pragma HLS INTERFACE axis port=INPUT_STREAM
#pragma HLS INTERFACE axis port=OUTPUT_STREAM
#pragma HLS RESOURCE core=AXI_SLAVE variable=rows metadata="-bus_bundle CONTROL_BUS"
#pragma HLS RESOURCE core=AXI_SLAVE variable=cols metadata="-bus_bundle CONTROL_BUS"
#pragma HLS RESOURCE core=AXI_SLAVE variable=return metadata="-bus_bundle CONTROL_BUS"
//指定这两个参数在函数执行过程中不会被改变
#pragma HLS INTERFACE ap_stable port=rows
#pragma HLS INTERFACE ap_stable port=cols
RGB_IMAGE img_0(rows, cols);
RGB_IMAGE img_1(rows, cols);
RGB_IMAGE img_2(rows, cols);
RGB_IMAGE img_3(rows, cols);
RGB_IMAGE img_4(rows, cols);
RGB_IMAGE img_5(rows, cols);
RGB_PIXEL pix(10, 10, 10);
#pragma HLS dataflow
hls::AXIvideo2Mat(INPUT_STREAM, img_0);
//Sobel:Computes a horizontal or vertical Sobel filter, returning
//an estimate of the horizontal or vertical derivative, using a filter
//第三个参数代表size,支持3,5,7,;
//前两个参数是(1, 0)=水平导数;(0, 1)=>垂直导数
hls::Sobel<1,0,3>(img_0, img_1);
//SubS Computes the differences between elements of image src and scalar value scl
hls::SubS(img_1, pix, img_2);
/*
* 经过scale处理
*/
//Scale Converts an input image src with optional linear transformation
//后面两个参数是变换比例和偏移,简单的说就是y=kx+b的k,b。
hls::Scale(img_2, img_3, 2, 0);
hls::Erode(img_3, img_4);
hls::Dilate(img_4, img_5);
hls::Mat2AXIvideo(img_5, OUTPUT_STREAM);
/*
//未经scale处理
hls::Erode(img_2, img_3);
hls::Dilate(img_3, img_4);
hls::Mat2AXIvideo(img_4, OUTPUT_STREAM);
*/
}
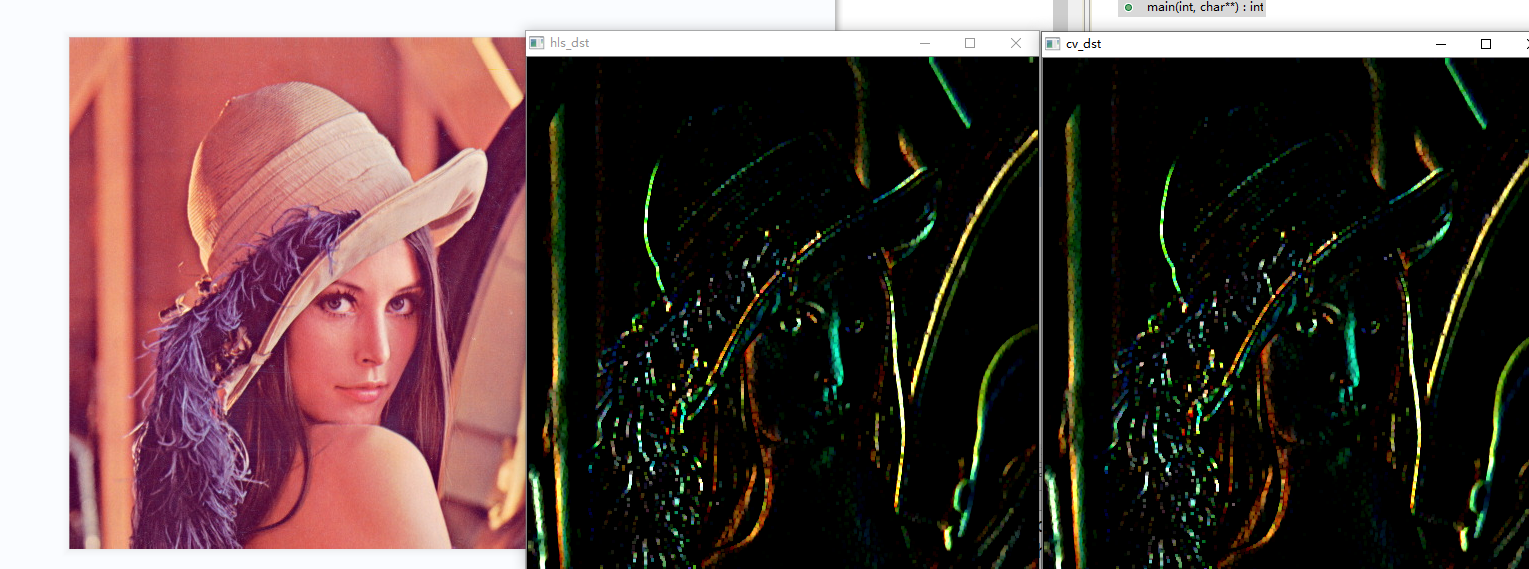
三、仿真结果
下图是提取边缘信息的仿真结果,分别是HLS实现和opencv实现:之后export RTL导出IP以供vivado使用。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 不听话的兔子君!